2.0 Skip i sjøgang, belastning i bølger

Fig. 2.01 Hangarskipet Bennington etter et møte med en tyfon utenfor Okinawa 1945. Deler av det forsterkede flydekket er brettet ned over baugen. (Trujillo og Thurman 2005)
2.1 Skip i sjøgang
Et skip som flyter på vannet beveger seg om tre akser – en langskips, en tverrskips og en vertikal. Skipet kan bevege seg på to måter om hver akse – på langs av aksen og med rotasjon om aksen. For et skip i sjøgang vil disse bevegelsene vanligvis opptre samtidig og i et avhengighetsforhold til hverandre. For å forenkle bildet vil jeg først se på bevegelsene hver for seg.
2.11 Skipets egenbevegelser.
Et skip som flyter i vannet har seks frihetsgrader i sine bevegelser, se fig. 2.02. Med antall frihetsgrader mener vi det antall forskyvningsparametre vi har til rådighet når bevegelsen skal beskrives.
Fig. 2.02 Skipets seks frihetsgrader (US Naval Academy 2003)
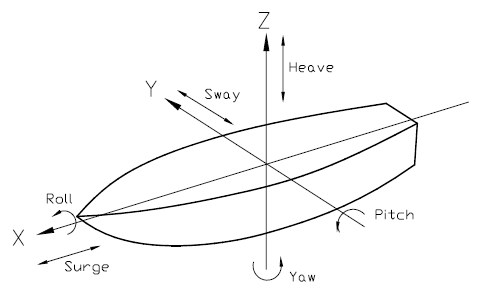
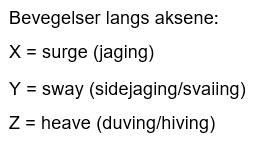
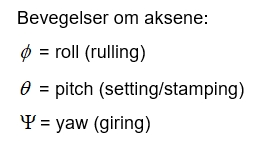

Fig. 2.03 Bevegelser uten tilbakeføringskrefter. (Wilhelmsen 1996)

Fig. 2.04 Svingninger om likevektstilstander. (Wilhelmsen 1996)
Fig. 2.03 viser de tre bevegelseskomponentene sway, surge og yaw. Disse har ingen tilbakeføringskrefter eller momenter. Dersom skipet blir brakt ut fra en utgangsstilling og kommer til ro der, blir det liggende i sin nye stilling.
Bevegelsene roll, pitch og heave (fig. 2.04) er derimot svingninger om en likevektstilstand, og har stor betydning for skipets egenskaper i bølger.
● Hiv (heave/duving) og stamping (pitch/setting) er parametere som vanligvis stemmer godt overens med antagelsen om lineær sammenheng mellom bølgehøyde og responsamplitude, selv også under ekstreme bølgeforhold. (Strengehagen 1977)
● Rulling (roll) derimot, er et parameter som er avhengig av ikke-lineære ledd. Det er imidlertid mulig å beregne rull med tilfredsstillende nøyaktighet med hjelp av lineære beregningsmetoder, som involverer en prøve- og feile-metode som kan være tidkrevende.
● Svai (sway/sidejaging) og gir (yaw) er koblet med rull, og dermed må en anta at disse parametere er influert av de ikke -lineære effekter i rull.
● Jaging (surge) er antatt å være lineær med bølgehøyden.
Koblingen av store rull-, jag- og gir-bevegelser (ikke-lineære sammenhenger) ser ut til å være årsaken til tverrkasting (broaching), og i noen tilfeller til dynamiske stabilitetstap. (Gustavsen 1983)
2.12 Frie svingninger.
Vi snakker om to typer svingninger, frie og tvungne. De frie svingningene oppstår som vist på fig. 2.04 ved at skipet blir ført ut fra sin likevektsstilling av en ytre kraft og slippes fri. Tilbakeføringskreftene er i de tre tilfellene; stabilitetsmomentet, trimmomentet og neddykkingsvekten/oppdriften. Hver av bevegelsene har sin karakteristiske naturlige periode som er bestemt av skipets hydrostatiske forhold, og avhengig av fartøyets masse (deplasement) og massefordeling (treghetsmoment).
Varigheten av de frie svingningene vil avhenge av dempingen av bevegelsene, som antydet på fig. 2.04. (Demping = overførsel av energi fra skipet til sjøen ved friksjon og bølgedannelse). (Sillerud 1981). Dempingen i duving og spesielt i setting er meget stor; disse svingningene dør derfor hurtig ut hvis ikke de ytre kreftene fra sjøen gir nye impulser som holder bevegelsene gående. I rulling kan derimot den naturlige dempingen være ganske liten – og rullebevegelsen kan vare lenge. Dette avhjelpes med slingrekjøler, antirulletanker eller stabiliseringsfinner. (Wilhelmsen 1996)
2.13 Tvungne svingninger.
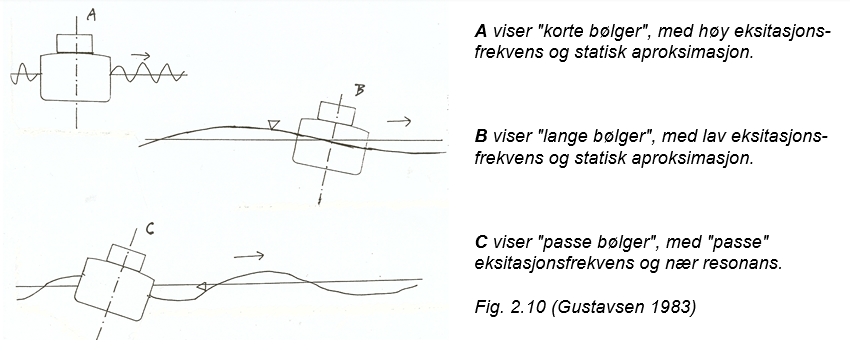
Skipet møter bølgene med et visst tidsintervall, møte-perioden, som avgjør hvor ofte skipet får bevegelsesimpulser. Bølgene påvirker skipet langs alle bevegelseskomponentene til tvungne svingninger i takt med møteperioden. Er denne ganske langsom, svarer skipets reaksjon helt til påvirkningen. Er den derimot nær en av de naturlige periodene, kan den tilsvarende bevegelsen bli kraftig forsterket.

Fig. 2.05 Med sjøen aktenfor tvers. (NOAA 1993)
Forsterkningen av rullingen er størst når dempningen for denne bevegelsen er minst, og ved resonans kan rulleutslagene bli store. I de andre bevegelsene er forsterkningen i størrelsesorden 1,5-2,0 (Wilhelmsen 1996) ved resonans mellom skip og sjø.
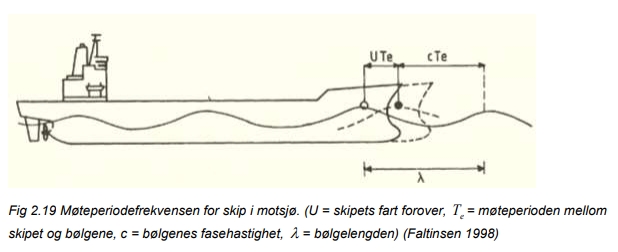
Møteperioden for et stilleliggende skip er lik bølgeperioden. Er skipet derimot i bevegelse, avhenger møteperioden av den relative bevegelsen mellom skip og bølger. Går skipet med samme kurs og fart som bølgene har, blir møteperioden uendelig stor – forholdene blir nesten statiske. Går skipet langsommere enn bølgene, overhaler bølgene skipet aktenfra. Går skipet hurtigere enn bølgene, kommer bølgene forfra i forhold til skipet.
I motsjø er forholdet at møteperioden blir mindre jo hurtigere skipet går, det gjelder for alle bølgelengder. Den nøyaktige størrelsen avhenger av så vel bølgelengden og -perioden, som skipets fart og kurs i forhold til sjøen. Det er skipets fartskomponent i bølgenes bevegelsesretning som er avgjørende. (Wilhelmsen 1996)

Fig. 2.06 Motsjø. (NOAA 1993)
2.14 Stabilitet i sjøgang.
Vi tar for oss følgende tre forhold av betydning:
● Stabiliteten endres på grunn av endring i opp¬driftskarakteristikken.
● Bølgene tilfører skipet krengningsenergi.
● Sjø bryter inn over dekk og reduserer stabiliteten.
Når et skip går mot eller med sjøen, vil skipets stabilitet endre seg kontinuerlig etter som skipets posisjon i forhold til bølgene endrer seg. Størrelsen av stabilitetsendringen er avhengig av skipets form og nedlasting og av bølgenes geometri.
Som fig. 2.07 viser, vil en bølgetopp midtskips redusere stabiliteten. Virkningen er størst i bølger med lengder noe større enn skipet.
Årsaken ligger i hovedsak i den endringen av oppdriftskarakteristikken som vi får mot enden av skipet, og som påvirker oppdriftsenteret B’s flytting mot lav side.
For et skip med dårlig stabilitet i stille vann kan derfor den reduksjonen vi får i stabiliteten, når skipet ligger på en bølgetopp, føre til at skipet blir ustabilt.
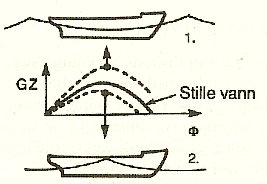
Fig. 2.07 (Wilhelmsen 1996)
Dette forholdet har flere ganger vært demonstrert ved forsøk i skipsmodelltanker. Også i flere tilfeller der skip har kantret, kan man av hendelsesforløpet slutte at årsaken har vært den stabilitetsreduksjonen man har fått idet skipet passerte en bølgetopp. (Wilhelmsen 1996)

Fig. 2.08 (Wilhelmsen 1996)
GZ-verdien er avhengig av vannlinjearealet, og dermed også avhengig av bølgens plassering på skipsskroget, hivbevegelsen, stampbevegelsen og rullbevegelsen.
Tenker vi oss så at bølgeprofilhastigheten er tilnærmet lik skipets hastighet, vil vi få reduksjon av GZ-verdien.
Når skipet «rir» på bølgetoppen reduseres skipets fribord midtskips.
Dette er forårsaket av at skipet mister vannlinjeareal og dermed initialstabilitet, og GZ-kurven reduseres. Kantringen skjer på samme måte som for et skip i stille vann. Hvor stor reduksjonen i GZ-armen blir, er avhengig av følgende forhold:
1) Bølgens hastighet.
2) Bølgens høyde.
3) Skipets hastighet.
4) Skipets retning i forhold til bølgen.
5) Skipets spanteform.
Størst blir reduksjonen i GZ-armen hvis bølgen har en slik høyde og lengde i forhold til skipet at dekket kommer ned i vannspeilet, og blir oversvømt av sjø.
Vann på dekk hever i de fleste tilfeller tyngdepunktet, i tillegg til at vi får effekten av fri væskeoverflate, og vil gi et krengemoment. Hvor stort dette er i forhold til skipets størrelse vil avhenge av hvor stort skipet er, og hvor mye vann det vil samle seg på dekk.
Vann på dekk kan inntreffe hurtig, og denne effekt må ansees farlig spesielt på små skip med lavt fribord og stort dekksareal.
SIS (Skip I Sjøgang) legger følgende kriterier til grunn for angivelse av skips stabilitet. (Nedrelid et al. 1981)
1. Stabilt fartøy under alle aktuelle lastekondisjoner.
2. Stabilt skip under lastebehandling.
3. Stabilt skip under konstant sidevind.
4. Stabilitetsmarginer for forskjellige skadetilfeller.
5. Stabilitetsmarginer forutsatt lasteforskyvning.
6. Stabilt skip ved isingssituasjoner.
2.15 Sikkerhet og stabilitet i bølger og ekstreme værsituasjoner.
SIS har gjort en vurdering av sikkerhet i sjøgang basert på kriterier for konkrete farlige situasjoner.
De har lagt til grunn følgende aspekter:
1. Valg av aktuelle bølgesituasjoner må baseres på data om vær, bølge og vindforhold i de aktuelle fartsområder.
2. Situasjonene defineres gjennom fartøyets posisjon, retning og lastekondisjon i forskjellige valgte bølgesituasjoner.
3. Godkjenning må avhenge av fartøyets bevegelser i de definerte bøIge/skip-situasjonene, og risikonivået for at situasjonene opptrer.
På grunn av erfaringer fra tidligere undersøkelser, samt erfaringer andre land har gjort gjennom tilsvarende undersøkeIser, foreslåes 7 forskjellige situasjoner som aktuelle for en sikkerhetsanalyse. (Nedrelid et al. 1981)
1. Fartøyets generelle rulleegenskaper vurderes i moderat sidesjø.
2. Fartøyets bevegelser i brytende bølger fra siden fastlegges.
3. Fartøyets bevegelser i kombinasjoner av brytende/ikke brytende bølger/bølgetog fra siden fastlegges.
4. Tap av stabilitet på bølgetopp i følgende sjø.
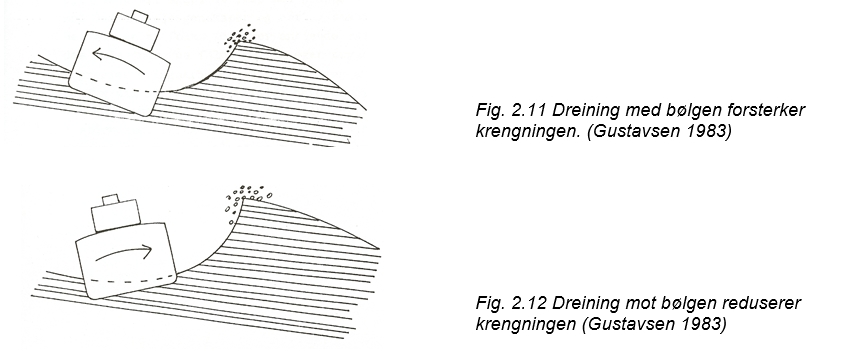
5. Faren for økende rulleutslag ved gange i følgende sjø.
6. Situasjoner når et fartøy løftes av en bølge, mister retningsstabiliteten, faller ut i en sving og kantrer. (Broaching.)
7. Kritiske kombinasjonssituasjoner av side- og akterlig sjø vurderes.
Samtlige av disse overfor nevnte stabilitetskriterier må vurderes i sammenheng med de akselerasjoner som kan oppstå. Skip med gode bevegelsesegenskaper har kantret i ekstreme værsituasjoner.
2.16 Krengning pga. manøvrering.
På store skip med høye overbygninger vil krengning pga. manøvrering være betydelig hvis en ikke er forsiktig med roret. (Spesielt cruiseskip, bilskip, containerskip o.l.)
I det roret legges over vil skipet først legge seg inn mot svingen som følge av rorkraften, avhengig av rorets utslag. Deretter vil kreftene fra vannstrømmen mot undervannsskroget, og massekreftene (sentrifugalkreftene), sette opp et krengemoment og tvinge skipet over til motsatt side av det roret viser.
Hvor mye skipet vil krenge avhenger av skipets svingeradius og skipets massemengde.

Fig. 2.09 (Gustavsen 1983)
2.17 Krengning pga. vind.
På en del av dagens skip har vi ganske store utslag pga. vind. Vindmomentet må taes i betraktning på skip med store skutesider, passasjerskip og containerskip med store flater.
Tar vi utgangspunkt i at skipet står loddrett og vindtrykket på siden økes sakte, vil skipet krenge til statisk likevekt. Hvis det skjer hurtig (vindkule), vil det krenge til det er i dynamisk likevekt, se fig 2.09.
2.18 Skip i sidesjø kombinert med brottsjø, drivende krefter (eksitasjonskrefter).
Skip i sidesjø som gir periodisk energitilførsel, kombinert med brottsjø er meget farlig for skip med liten GM. Størst energimengde som overføres til skipet i rull, er når eksitasjonsmomentet har en periode nær egenrulleperioden.
Får man kombinasjoner mellom en eksitasjonsfrekvens som gir resonans og en brottsjø, vil sannsynligheten for kantring være stor. (Vårheim og Nedrelid 1980)
Betrakter vi en brottsjø separat er dens effekt avhengig av følgende:
– Slaget fra bølgen som treffer overbygning og skrog.
– Den steilhet bølgefronten har og som skipet må flyte på.
Den steile bølgefronten er imidlertid den avgjørende årsak til fartøyets krengevinkel. Fra modellforsøk vet man at disse store kritiske krengevinkler stort sett er uavhengige av skipets stabilitet. Om skipet blir liggende slik også etter at bølgen hadde passert, er avhengig av om skipet fremdeles har en rettende GZ-arm ved denne aktuelle krengevinkel. (Vårheim og Nedrelid 1980)
2.2 Belastninger i bølger
Det er mulig å kunne forutsi statistisk respons i uregelmessig sjø ved lineær overlagring av responsen i regulære bølger når sjøen blir representert ved et bølgespektrum (energispektrum). (Denis og Pierson 1953)
2.21 Stripeteori. Beregningsprosedyrer.
Korvin-Kroukovsky og Jacobs la grunnlaget for å beregne hiv og stampebevegelser for et skip i konstant hastighet forover i regulære bølger, kalt stripeteori. Stripeteorien er stadig blitt forbedret, og i 1970 la Salvesen, Tuck og Faltinsen fram en forbedret utgave av stripeteorien hvor en kunne beregne både hiv, stamp, rull, svai og gir. (Salvesen et al. 1970)
Prinsippet ved stripeteori er at strømningen i ethvert tverrplan er den samme som om tverrsnittet hadde stått i en uendelig lang sylinder med samme tverrsnittsareal.
Fig. 2.13 Skipsskrog oppdelt for bruk ved stripeteori. (Faltinsen 1998)
Vi vet at ettersom et skip har mye større lengde enn bredde og dypgang blir strømningsvariasjonen mye større i tverrplanet enn i langskipsplanet.
2.22 Kort resyme av teori om skipsbevegelser.
Ut fra omtalte stripeteori, hvor en deler skipets skrog opp i et viss antall striper, kan en ved hjelp av regulære langkammede bølger finne de hydrodynamiske krefter på hver enkel stripe. Summerer en disse krefter vil en få de krefter som virker på hele skroget. Fra dette er det så mulig å finne de enkelte koeffisienter i skipets differensialligninger. Løsningen til dette sett av differensialligninger er grunnlaget for de såkalte transferfunksjoner.
En transferfunksjon er et begrep som brukes om skipets responser på et sett med regulære sinusbølger for en bestemt kurs, fart og bølgefrekvenser.
Når en beregner transferfunksjoner for en mengde bølgelengder for en gitt kurs og hastighet, og repeterer dette, kan en finne transferfunksjoner for alle kurser og hastigheter. Ved hjelp av dette kan en finne en transferfunksjon angitt som en funksjon av møtefrekvensen. Ved beregning av respons i uregelmessig sjø brukes lineær overlagring. Derved antar en at responsen er lineært avhengig av bølgehøyden, og at transferfunksjonen kan bli kombinert med bølgespekteret, og at en gjennom dette kan finne responsspekteret. (Gustavsen 1983)
Fremgangsmåten for å finne responsen i uregelmessig sjø blir dermed som følger:
1) Responsen i regulære, langkammede bølger bestemmes.
2) Resultatet av disse beregningene er transferfunksjonene.
3) Transferfunksjonene kombineres med et bølgespektrum, og derved finnes responsspekteret for korte eller langkammede, uregelmessige bølger
2.23 Belastninger på skipet i sjø.
Et skip som arbeider i sjøen er utsatt for tilleggsbelastninger på grunn av akselerasjonskrefter i skipets seks frihetsgrader, og bølgeinduserte spenninger og trykk. Disse blir overlagret de belastningene som virker på skroget i stille vann, forårsaket av oppdriftens hydrostatiske trykk og vektfordelingen av skrog og last. (Wilhelmsen 1996)
Skipskonstruktørene og klassifikasjonsselskapene bør naturligvis ha den beste kunnskap om de belastningene et skip er utsatt for, og hvordan styrkematerialet skal fordeles i skroget slik at de forskjellige skrogdelene får den styrken som svarer til belastningen som delen får.
Som ansvarshavende om bord må en imidlertid hele tiden være klar over at et hvilket som helst skip bare har tilstrekkelig styrke under forutsetning av at skipet får den behandling byggereglene forutsetter for vektfordeling og behandling av skipet i sjøen. (Wilhelmsen 1996)

Fig. 2.14 Belastninger i sidesjø. (Wilhelmsen 1996)
2.24 Globale belastninger. Bølgehøyden (H)
Energien i bølger øker tilnærmet med  . Dette får spesielt stor betydning når brytende bølger treffer skipet. Momenter og skjærkrefter er tilnærmet lineært avhengig av H.
. Dette får spesielt stor betydning når brytende bølger treffer skipet. Momenter og skjærkrefter er tilnærmet lineært avhengig av H.
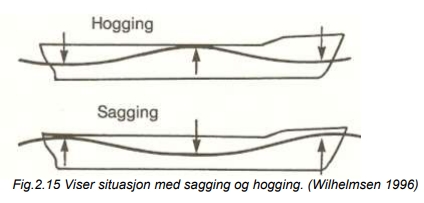
I akterlig sjø med  vil belastningene stadig skifte mellom sagging (strekk i bunn og trykk i dekk), og hogging (strekk i dekk og trykk i bunn). Bølgemomentene er vanligvis 10-20 % større i sagging enn i hogging, som følge av bølgeprofilen.
vil belastningene stadig skifte mellom sagging (strekk i bunn og trykk i dekk), og hogging (strekk i dekk og trykk i bunn). Bølgemomentene er vanligvis 10-20 % større i sagging enn i hogging, som følge av bølgeprofilen.
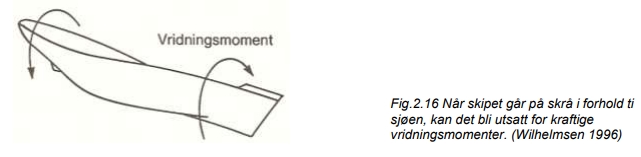
Når skipet går på skrå i forhold til sjøen, kan det som vist på fig. 2.16 bli utsatt for kraftige vridningsmomenter. Skip med store lukeåpninger er naturlig nok spesielt utsatt for skader i dekkskonstruksjonen som følge av dette.

De momentene som oppstår, virker også deformerende på tverrskipskonstruksjonen. De mange tverrskipsrammene og skottene skal hindre slik deformasjon.
Vertikale bøyemomenter og skjærekrefter bli størst i motsjø og medsjø, med maksimalverdier når skipet går tvers på bølger med en lengde nær skipets lengde, og minst på kurs med bølgene rett fra siden. (Wilhelmsen 1996)
2.25 Lokale belastninger.
Belastningene, den relative respons, er vesentlig avhengig av bølgeenergien, vertikale akselerasjoner i skipet, og den relative bevegelsen mellom skipet og sjøen.
Kursjustering og fartsreduksjon er som oftest nødvendig for å redusere belastningene. Dette gjelder ikke under alle forhold. Relativ bevegelse blir påvirket av forholdet mellom møteperioden og skipets egenperiode for hiv- og settebevegelser.
2.26 Bunnslag.
Fig. 2.21 viser bunnslag hvor skipet under gang i sjøen vil sette samtidig som det hiver med en vertikal bevegelse i bølgene. I ugunstige tilfeller kan baugen på et fartøy få stor hastighet nedover samtidig som bølgeflaten har stor hastighet oppover.
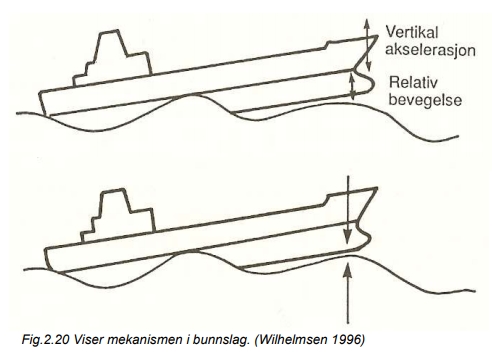
Oppstår den største settevinkelen like før et slikt ugunstig tilfelle inntreffer, er betingelsene til stede for et kraftig bunnslag.
Om et skip som går i bølger skal få baugen løftet ut av vannet under setting, bestemmes av skipets dyp gående og den relative bevegelsen mellom skip og sjø. Stort dypgående vil redusere risikoen for bunnslag. Det samme gjelder for fartsreduksjon, forutsatt at bølgelengden er stor i forhold til lengden på skipet. Forskipet kan imidlertid løftes ut av sjøen under setting i grov sjø, selv når skipet ligger på været. Er bølgene betydelig kortere enn skipet, vil det ofte være større sannsynlighet for at forskipet løftes ut av sjøen når skipet ligger på været, enn om det avanserer med rimelig fart mot sjøen. (Wilhelmsen 1996)
Bunnens form er også viktig. Flat bunn er ugunstig, mens V-formet er gunstig.
Skader fra bunnslag begrenses ved at skipet sikres tilstrekkelig dypgang, og at fart og kurs avpasses etter forholdene. Anbefalt minimum dypgang forut er 0,027-0,03 L. Dvs. 2,7-3,0 m dypgående ved L = 100 m
2.27 Dynamiske krefter.
Kontroll av dynamisk respons er helt sentralt for marine konstruksjoner. Her følger en kort gjennomgang av viktige prinsipper og karakteristikker ved kontroll av dynamisk respons.
1. ordens bølgekrefter antas vanligvis å ha energi av betydning for marine konstruksjoner i periodeintervallet 3-24 sek. (eller 0.045-0.33 Hz). For å illustrere hvordan havbølger virker på konstruksjoner, skal vi se litt på bølgene i disse ytterpunktene. En 3 sekunders bølge har bølgelengde:
 (2.01)
(2.01)
Grensen for brytende bølger antas å være gitt ved:
 (2.02)
(2.02)
Denne bølgen kan maksimalt bli 2 m høy (dobbeltamplitude). Bølgepartikkelhastigheten i overflaten kan finnes fra lineær bølgeteori for dypt vann, og er gitt ved:
 (2.03)
(2.03)
Ifølge lineær teori avtar amplituden for bølgevirkninger som en eksponentiell funksjon av vanndypet d, bestemt av faktoren:
 (2.04)
(2.04)
Dette betyr at allerede på 7 meters vanndyp er bølgevirkningen dødd ut, slik at hastigheten er redusert til 0.1 m/s. Tilsvarende vil en 24 sekunders bølge ha en bølgelengde på 900 meter, og gi virkninger som tilsvarer 50 % av virkningen i overflata helt ned på 100 meters vanndyp. I Nordsjøen kan vi forvente bølgehøyder opp til 32 meter og med periode på om lag 15 sekunder. En slik bølge gir en hastighet på 6.7 m/s i overflata og 1.1 m/s på 100 m vanndyp.
Bølgekrefter oppstår også på differansefrekvenser  . Disse kalles bølgedriftskrefter og er opphav til såkalte langperiodiske bevegelser. Periodeintervallet av interesse antas vanligvis å være 1-3 minutter. I det samme periodeområdet finnes også krefter fra tidsvarierende vind.
. Disse kalles bølgedriftskrefter og er opphav til såkalte langperiodiske bevegelser. Periodeintervallet av interesse antas vanligvis å være 1-3 minutter. I det samme periodeområdet finnes også krefter fra tidsvarierende vind.
Også på sumfrekvensene  vil det oppstå krefter. Slike krefter kan gi dynamisk respons av systemer med egenperioder kortere enn de typiske bølgeperiodene. Eksempel her er «springing», en høyfrekvent global svingning i et skipsskrog eller hiv- og stampebevegelser av strekkstagplattformer.
vil det oppstå krefter. Slike krefter kan gi dynamisk respons av systemer med egenperioder kortere enn de typiske bølgeperiodene. Eksempel her er «springing», en høyfrekvent global svingning i et skipsskrog eller hiv- og stampebevegelser av strekkstagplattformer.
Bølger kan også gi krefter på høyere frekvenser enn sin egen grunnfrekvens  . Dette kan dels skyldes dragkrefter som gir frekvensbidrag med odde faktorer av bølgefrekvensen . (dvs.
. Dette kan dels skyldes dragkrefter som gir frekvensbidrag med odde faktorer av bølgefrekvensen . (dvs.  osv). Kombinert med strøm vil også like frekvenser (
osv). Kombinert med strøm vil også like frekvenser ( osv) opptre.
osv) opptre.
I store, steile bølger opptrer det også andre ikke-lineære krefter med et langt høyere frekvensinnhold enn bølgens grunnfrekvens. Disse kreftene er knyttet til forhold omkring selve bølgetoppen og gir opphav til såkalt «ringing» av faste betongplattformer og strekkstagplattformer. (Larsen 2000)