6.0 Broaching (tverrkasting)

Fig. 6.01 Fiskebåten Katana i en typisk broach før hun kantrer utenfor Greymouth, New Zealand. Foto: Mike Smith. (Besier 2005)
6.1 Farer forbundet med å gå i akterlig sjø, og sjø aktenfor tvers
Et fartøy som går i akterlig sjø eller sjø aktenfor tvers, opplever bølgene i en lengre periode enn i sidesjø, motsjø eller forenfor tvers. Vesentlige farer som kan følge av slike situasjoner er som følger:
● Surfing og broaching
● Reduksjon av intakt stabilitet som følge av at fartøyet «rir» på bølgetoppen midtskips
● Parametrisk resonans
● Seiler i høye bølger med samme fart i bølgeretningen som bølgenes gruppehastighet
● Kombinasjon av ulike farlige fenomener
Vi snakker her om farlige situasjoner som følge av ugunstige kondisjoner; hvor bølgelengden er mer enn fra 0,6 til 0,8 x fartøyets lengde, og hvor bølgehøyden er mer enn 0,4 x fartøyets lengde, eller – uavhengig av bølgelengde og -høyde – med et periodisk bølgetog som kan forårsake harmonisk resonans med fartøyets rulleperiode. (IMO 2005)
6.11 Fartøyet «rir» på bølgetoppen midtskips.
Forhold rundt reduksjon av intakt stabilitet som følge av at fartøyet «rir» på bølgetoppen midtskips, er behandlet under Kap. 2.1 Skip i sjøgang og 2.2 Belastninger i bølger, foruten under Kap. 5.1 Parametrisk resonans.

Fig. 6.02 Billie Jean «surfer» på bølgetoppen. Foto: Peter Maich. (Besier 2005)
Derfor vil jeg her bare se nærmere på IMOs angivelse av kritiske forhold mellom bølgelengde og fartøyets lengde, og variasjoner i stabilitetsparameteret ved følgesjø:
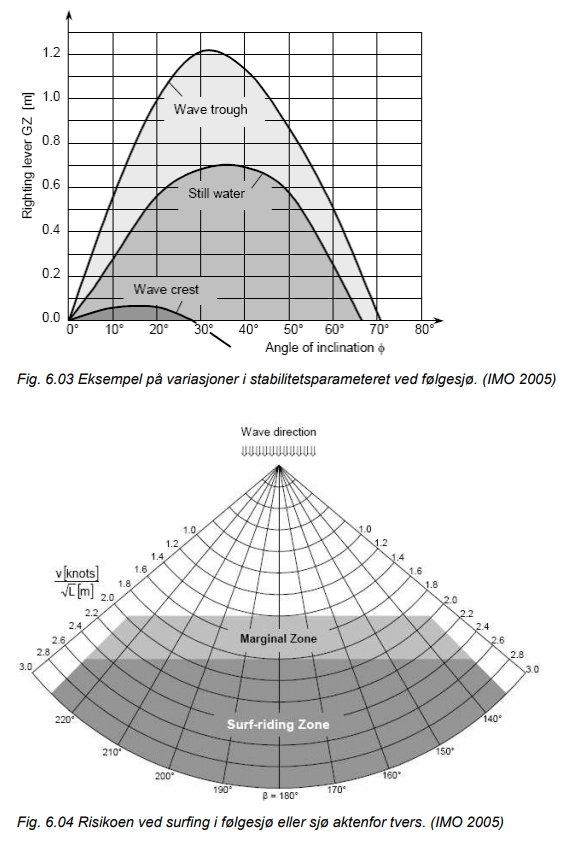
Når et fartøy rir på bølgetoppen, vil den intakte stabiliteten avta vesentlig i forhold til reduksjonen av den delen av skroget som til enhver tid er under vann. Tapet av stabilitet kan bli kritisk ved bølgelengder innenfor området; fra 0,6 til 0,7 x fartøyets lengde, opp til fra 1,5 til 2,0 x fartøyets lengde. Innen dette området er omfanget av stabilitetsreduksjonen nesten proporsjonal med bølgehøyden. Denne situasjonen er spesielt farlig i følgesjø og sjø aktenfor tvers, fordi tidsintervallet med dårligere stabilitet under vedvarende riding på bølgetoppen blir langt.
Fig. 6.03 viser et eksempel på variasjoner i stabilitetsparameteret ved følgesjø. Ved å redusere fartøyets fart til under den farlige sonen i fig. 6.04, kan en effektivt unngå tap av stabilitet på en bølgetopp: (IMO 2005)
6.12 Parametrisk resonans.
Forhold rundt parametrisk resonans er behandlet i Kap. 5.0.
6.13 Seiler med samme fart i bølgeretningen som bølgenes gruppehastighet.
Her følger bølgeteori som er behandlet i Kap. 3.0. Når jeg velger å gjenta det her, er det fordi det danner bakgrunn for en spesiell farlig situasjon som IMO har valgt å sette søkelyset på:
Bølger i en uregelmessig sjøtilstand er ikke enhetlig hva bølgehøyden angår. Det er en kjent sak blant sjøfolk at det innimellom dukker opp grupper med høyere bølger, de såkalte tre søstre, fulgt av et antall bølger med lavere høyde. Disse bølgegruppene beveger seg med vinden i en gruppehastighet som er omtrent halvparten av fasehastigheten – se Kap. 3.33.
Hvis fartøyet befinner seg innen en slik gruppe med høye bølger, og fartøyets fartskomponent i bølgeretningen er omtrent lik bølgenes gruppehastighet, vil fartøyet bli utsatt for vedvarende angrep fra de høye bølgene over lang tid. Maksimal bølgehøyde i en gruppe med høye bølger, kan bli nesten det dobbelte av den signifikante bølgehøyden til den aktuelle sjøtilstanden.
I en slik situasjon vil følgene av surfing, reduksjon av intakt stabilitet på en bølgetopp, parametrisk resonans, eller en kombinasjon av disse alvorlige fenomenene, bli mer alvorlig og således øke risikoen for kantring.
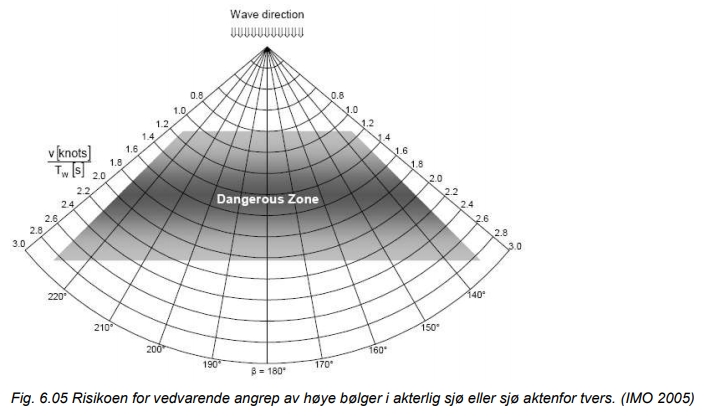
Hvis det skulle vise seg at fartøyet er underveis inn i en farlig kondisjon ved at farten er omtrent den samme som bølgenes gruppehastighet, se fig. 6.05, må fartøyets fart reduseres og/eller kursen endres slik at den farlige sonen forlates. (IMO 2005)
6.14 Kombinasjon av ulike farlige fenomener.
De dynamiske belastningene på skip i følgesjø og sjø aktenfor tvers er meget komplekse. Skipsbevegelsene er tredimensjonale, og forskjellige skadelige faktorer eller farlige fenomener kan oppstå; som ekstra krengemoment
som følge av at dekket kommer i sjøen, vann på dekk og derav «slakk tank»-effekt, og forskyvning av last som følge av store rullebevegelser. Alt dette kan oppstå i kombinasjon med de farlige kondisjoner som nevnt under 6.13, samlet eller en for en etter hverandre. Dette kan forårsake ekstremt farlige kombinasjoner som kan lede til at fartøyet kantrer.
6.2 Broaching

Fig. 6.06 From surf riding to loss of control, broaching and capsizing. Båtens og mannskapets skjebne, og fotografens navn er ikke kjent. Men det gikk kanskje ikke særlig bra. (Besier 2005)
Når et skip i følgesjø blir tatt igjen av bølgeprofilet, vil skipet surfe på bølgetoppen. Dette resulterer i at skipet opptar energi fra bølgen og for en tid tvinges til å gå med tilnærmet samme hastighet som bølgen.
Rorets effekt reduseres, skipet mister retningsstabilitet og skjærer plutselig ut av kurs og inn i en sving, for så å krenge over mot lesiden.
6.21 Skipet mister retningsstabilitet.
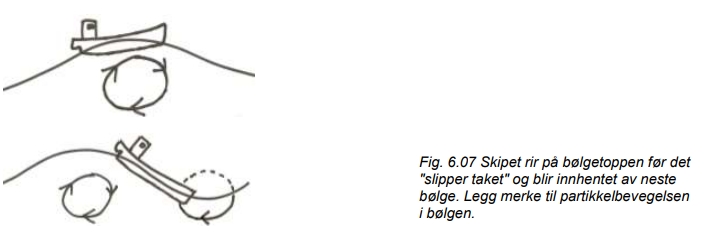
Når skipet rir på bølgetoppen, kan roret komme helt eller delvis ut av vannet. Når roret er nede i vannet, går partikkelbevegelsen i bølgen samme vei som skipet, noe som gir lav relativ hastighet mellom skipet og vannpartiklene, se fig. 6.07. Begge tilfeller gir redusert rorkraft. Når skipet går med sjø aktenfor tvers, vil det gi ulikt neddykket areal på hver side av skipets senterlinje. Siden med mest neddykket areal gir størst motstand og «bremser» skipet over slik at det krenger.
Det er under slike omstendigheter en trenger et best mulig manøvrerbart fartøy, men her er rorkraften redusert og skipet mister retningsstabilitet.
6.22 Partikkelbevegelsen i bølgen.
Som en følge av banehastigheten vil vannpartiklene akselerere fra null til maksimum i løpet av en kvart bølgelengde. På nederste figur i fig 6.07 vil
vannpartiklene nær baugen på skipet, og i bølgedalen bevege seg i motsatt retning i forhold til bølgen. Vannpartiklene nær akterenden beveger seg i samme retning som bølgen. Dette betyr kort sagt at vannet rundt akterenden beveger seg i motsatt retning av vannet rundt baugen.
Dette skaper to motsatte krefter som gir et vridningsmoment hvis fartøyets retning ikke er nøyaktig parallelt til bølgen. Strømmen av vann forbi roret har avtatt, og styringen blir mer og mer vanskelig. Fartøyet viser en økende tendens til å dreie sideveis som et resultat av det stigende presset på baugen. (Besier 2005)

Fig. 6.08 Et typisk eksempel på broaching. (Kilde ukjent)
6.23 Broaching.
Mangel på styring gjør at fartøyet dreier sideveis, og når dreiningen først har begynt, når den raskt maksimum. I løpet av kort tid er fartøyet vridd tvers av den framskytende bølgekammen.

Fig. 6.09 Hildaron av Westport. Foto: Linda Todd. (Besier 2005)
Fartøyet har gjort en voldsom 90° turn med det resultat at det lineære momentum ( = masse x hastighet ) er konvertert til et betydelig kantringsmoment, som i verste fall kan resultere i kantring.

Fig. 6.10 En broach. (Besier 2005)

Fig. 6.11 Kantring i henhold til momentum. (Besier 2005)
En broach fulgt av kantring er nødvendigvis ikke avhengig av store bølger. Det er momentum skapt av hastigheten gjennom vannet som står for mesteparten av kantringsmomentet. Enhver grad av positiv stabilitet er av liten eller ingen betydning i denne sammenheng.