5.0 Parametrisk resonans
Parametric Roll Resonance (Parametric Roll)

Fig. 5.01 Da det store post-panamax containerskipet kreket seg inn på havna i Seattle 1. november 1998, ble det skrevet historie. En rekord var satt, en rekord ingen ønsket å slå. (Hansen 1998)
5.1 Parametrisk resonans og containerskip
Under overfarten fra Kaohsiung, Taiwan, hadde MV APL China mistet 406 containere og nær innpå 1000 var skadet, hvorav en tredjedel lå slengt rundt som vrakgods. Ødelagte containere og innhold hang ut over begge skipssidene.
Underveis hadde fartøyet møtt en voldsom storm, som gjennom 12 timer hadde generert en kraftig vind og bølger som nådde opp til broen. Offiserene hadde ikke bare sett grønt vann i øyehøyde på broen, de hadde også vært hjelpeløse vitner til at stabler med containere forut kollapset.
5.11 Uvanlig bevegelsesmønster.
Til tross for de største anstrengelser fra skipets profesjonelle mannskap fikk de ikke fartøyet ut av et høyst uvanlig bevegelsesmønster, uvanlig selv under et slikt uvær hvor fartøyet ellers kan være nærmest umulig å kontrollere. Skipet giret med inntil 20° utslag stb og bb, og en voldsom rulling opp mot 40° kombinert med en ekstrem stamping gjorde at kapteinen var uten effektiv kontroll over fartøyet. MV APL China var fanget i et fenomen kjent som parametrisk resonans.

Fig. 5.02 Ødelagte containere og innhold hang ut over begge skipssidene.(Hansen 1998)
5.12 Trussel mot moderne containerskip.
Parametrisk resonans kan fremstå som om det forekommer relativt sjeldent, men utgjør en spesielt farlig trussel mot moderne containerskip. Det er avhengig av sammentreff av flere forhold som krever en slik innbyrdes balanse at det kan synes vanskelig å oppnå: Fartøyets geometri må ha en spesiell karakteristikk; fartøyets lengde må være sammenlignbar med bølgelengden i den sjøtilstanden fartøyet beveger seg i; fartøyets fart må ha et visst forhold til både bølgelengden og fartøyets rullefrekvens.
Hendelsen med MV APL China resulterte i et tap av last til en verdi av i overkant US$ 100 millioner dollars. Dette ga støtet til en granskning av omstendighetene som førte til hendelsen, hvilket åpnet den maritime industriens øyne for et mangeårig problem, en problemstilling som man enda ikke fullt ut hadde oppfattet rekkevidden av. Undersøkelsene viser at skrog med undervannsskrog bygd for en viss fart, kombinert med en bred og flat hekk og en baug med stort overheng, lettere kan bli utsatt for parametrisk resonans. Beskrivelsen passer spesielt godt på moderne containerskip, men også f. eks. paragrafbåtene i fiskeflåten på inntil 23 m. ligger innenfor kravkarakteristikken, iflg. Birger Enerhaug i SINTEF.

Fig. 5.03 (Surveyor 2004)
5.2 Hva er parametrisk resonans?
Parametrisk resonans forekommer både i møtesjø og akterlig sjø når fartøyet går mer eller mindre vinkelrett mot eller fra bølgefronten. Tidligere observerte en fenomenet for det meste i forbindelse med mindre fartøyer med dårlig stabilitet i akterlig sjø. Nå har utviklingen av en ny generasjon av store, raske containerskip med undervannsskrog bygget for fart, og med stor dekkskapasitet, igjen rettet søkelyset på problemet.

Fig. 5.04 I vårutg. 2004 av ABS-tidsskriftet Surveyor gis denne forklaringen på hvordan det nødvendige energioverskuddet bygges opp. (Surveyor 2004)
5.21 Kreftene som utløser parametrisk resonans.
Kreftene som utløser parametrisk resonans er alltid til stede til sjøs. De motvirkes av fartøyets intakte stabilitet, en balansert kraft nedfelt i fartøyets linjer og fasong. Når en kraft forårsaker at fartøyet ruller, vil den opprettende kraften motvirke bevegelsen og etter hvert få fartøyet tilbake til nøytral posisjon.
I parametrisk resonans blir denne likevekten forstyrret. I stedet for å få redusert rullebevegelsen vil fartøyet øke den, raskt og farlig.
Når skipet går i motsjø vil det møte en serie med bølgetopper og bølgedaler. Farten dette skjer med kalles møtefrekvensen. Hvis  vil skipet uavbrutt havne i situasjoner hvor midtskipet enten sitter dypt i en bølgetopp med baugen og akterskipet samtidig grunt i en bølgedal, eller midtskipet grunt i en bølgedal med baugen og akterskipet samtidig dypt i hver sin bølgetopp. I pakt med skrogets kontakt med sjøen, vil fartøyets bredde synes å forandre seg med regelmessighet; fra smalt når midtskipet er i en bølgetopp, til bredt når baugen og akterskipet er i hver sin bølgetopp.
vil skipet uavbrutt havne i situasjoner hvor midtskipet enten sitter dypt i en bølgetopp med baugen og akterskipet samtidig grunt i en bølgedal, eller midtskipet grunt i en bølgedal med baugen og akterskipet samtidig dypt i hver sin bølgetopp. I pakt med skrogets kontakt med sjøen, vil fartøyets bredde synes å forandre seg med regelmessighet; fra smalt når midtskipet er i en bølgetopp, til bredt når baugen og akterskipet er i hver sin bølgetopp.
5.22 Fra bølgetopp til bølgedal.
Stabilitet forandrer seg med skipets bredde. Når skipet går gjennom en serie av bølgefronter vil stabiliteten endre seg dramatisk ettersom midtskipet går fra bølgetopp til bølgedal. Denne variasjonen er den underliggende kondisjonen som utløser parametrisk resonans. Men for at alt skal gå galt må enda en kondisjon inntreffe; fartøyets møtefrekvens må være ca. det dobbelte av dets naturlige rullefrekvens, hvilket forårsaker en situasjon med vedvarende minimal stabilitet.

Fig. 5.05 (Surveyor 2004)
5.23 Hva reddet APL China?
En kan undre seg over hva som reddet MV APL China fra å kantre? Det viser seg at fartøyet mistet maskinkraften midlertidig som følge av vanninntrengning i maskinrommet i løpet av stormen. Vinden snudde fartøyet fra motsjø til å drive i sidesjø, og tvang det dermed ut av parametrisk resonans.

Fig. 5.06 Guide for the Assessment of Parametric Roll Resonance in the Design of Container Carriers. (ABS 2004)
5.24 Vadim Belenky forklarer.
Vadim Belenky, Ph.D., tidligere professor ved Kaliningrad University, nå ledende på parametrisk resonans ved ABS, American Bureau of Shipping, sier det slik:
«Tenk deg at fartøyet ditt har slagside, og når det begynner å rette seg kommer midtskipet i en bølgetopp hvor det er dårligere stabilitet (enn i stille vann). Dette medfører at fartøyet vil få et større utslag til motsatt side enn hva du regnet med. Når det retter seg tilbake er midtskipet kommet i en bølgedal hvor stabiliteten og de opprettende krefter er større (enn i stille vann). Dette vil gi nok en økning i rullebevegelsen. Ettersom dette fortsetter vil du forsterke bevegelsen og farten, på samme måte som et barn øker farten på en svinghuske.» Se fig. 5.04 og 5.05. (Surveyor 2004).

Fig 5.07 Utvikling av parametric resonans. (ABS 2004).
5.25 Terskelfenomen.
Parametrisk resonans er et «terskelfenomen». Før du stiger over terskelen vil ikke noe alvorlig ha skjedd med bevegelsesmønsteret, men med en gang du har tatt steget over vil du knapt kunne reversere situasjonen. Du har kanskje fra fem til ni bølgeperioder, tre til fire minutter, hvor du må ta de riktige grepene for ikke å havne store problemer.
5.26 Rulledemping og/eller endring av undervannsskroget.
En mulig løsning på problemet parametrisk resonans er å installere en riktig tunet stabilitetstank, som underveis kan absorbere det energioverskuddet som er nødvendig for å starte parametrisk resonans. Den behøver ikke ha et rominnhold på mer enn ca. to containere tilsammen.
5.27 Spesielt utsatte undervannsskrog.
ABS kan nå gi kriteriene som tillater en skipsdesigner å sjekke om et fartøy på tegnebrettet er ekstra mottagelig for parametrisk resonans. En kan deretter utvikle diagrammer som kan definere hvilke kombinasjoner av fart og sjøtilstand, for en nærmere angitt lastekondisjon, som kan representere fare. (Belenky 2004)

Fig 5.08 Eksempel på et «Sample Polar Diagram». (ABS 2004)
5.3 Hva sa de før i tiden?
Parametrisk resonans kan inntreffe både i møtesjø (Head Sea) og akterlig sjø (Following Sea). Blant de første som observerte fenomenet parametrisk resonans i modelltester, var prof. J. Randolph Paulling tidlig på 70-tallet. (Chou et al. 1975)
5.31 Problemet har vært kjent lenge.
Problemet rundt skip som ruller, og i verste fall kantrer i akterlig sjø, har vært kjent lenge. Fra 1950 og frem til i dag har dette blitt behandlet i forskjellige sammenhenger og med forskjellig utgangspunkt. O. Grim antok at forandringen i stabilitet fra skip i stille vann til skip i sjøgang, var årsaken til den kraftige krengingen og rullingen som til tider kunne observeres hos skip som går i akterlig sjø. Bølgene forårsaker endringer i de hydrostatiske og hydrodynamiske kreftene som virker på skipet. (Grim 1952)
5.32 Mathieu-ligningen.
For små rullevinkler kan bevegelsesligningen til skip i regelmessig sidesjø skrives som:
I akterlig sjø går en ut ifra at på grunn av skrogets symmetri vil en ikke få noe eksiterende moment. (Enerhaug 1975) Etter Grims antagelse vil stabiliteten også variere periodisk. Dersom stabilitetsvariasjonen settes =  , samtidig som dempningen neglisjeres (for å forenkle det matematiske arbeidet), står en igjen med:
, samtidig som dempningen neglisjeres (for å forenkle det matematiske arbeidet), står en igjen med:
![]()
i matematikken kjent som Mathieu-ligningen. Karakteristisk for denne er at løsningen har ustabile områder hvor  kan anta alle verdier fra 0 til uendelig. For å oppnå endelige verdier av i det ustabile området, må en innføre en dempning som vokser raskere med utslagene. Med bakgrunn i den ustabile løsningen, konkluderer Grim med at for visse periodeforhold kan en forvente at skip i akterlig sjø vil rulle, selv med et eksiterende moment lik null.
kan anta alle verdier fra 0 til uendelig. For å oppnå endelige verdier av i det ustabile området, må en innføre en dempning som vokser raskere med utslagene. Med bakgrunn i den ustabile løsningen, konkluderer Grim med at for visse periodeforhold kan en forvente at skip i akterlig sjø vil rulle, selv med et eksiterende moment lik null.
Grim underbygger så teorien med modellforsøk. Opprettende moment ved rullevinkler større enn  er ikke lenger lineært, men gitt som:
er ikke lenger lineært, men gitt som:
![]()
Dersom dette uttrykket innføres i Mathieu-ligningen sammen med et ikke-lineært dempingsledd, stemmer iflg. Grim den analytiske løsningen overens med forsøksresultatene.
Grim har dermed vist at det i akterlig sjø kan oppstå store rullebevegelser, selv for meget små eksiterende moment.
Under forsøkene endrer stabiliteten seg dobbelt så hurtig som rullebevegelsen  i 1. resonansområde. Grim forklarer dette med at når forholdet er faseforskjøvet slik at stabiliteten (GZ) er minst når rulleutslaget er størst, vil opprettende moment være økende når bevegelsen går fra maks. utslag bb mot = 0, og avtagende når går fra 0 mot maks. utslag stb. Fra maks. utslag stb mot = 0 vil opprettende moment på nytt øke slik at når = 0 vil hastigheten være større enn ved forrige passering ved = 0. Dette vil medføre stadig økende rullevinkler inntil en likevektstilstand oppnås. Hvis det inntreffer en faseforskyvning mellom de to svingetilstandene i dette forholdet, vil rullebevegelsen raskt dø ut.
i 1. resonansområde. Grim forklarer dette med at når forholdet er faseforskjøvet slik at stabiliteten (GZ) er minst når rulleutslaget er størst, vil opprettende moment være økende når bevegelsen går fra maks. utslag bb mot = 0, og avtagende når går fra 0 mot maks. utslag stb. Fra maks. utslag stb mot = 0 vil opprettende moment på nytt øke slik at når = 0 vil hastigheten være større enn ved forrige passering ved = 0. Dette vil medføre stadig økende rullevinkler inntil en likevektstilstand oppnås. Hvis det inntreffer en faseforskyvning mellom de to svingetilstandene i dette forholdet, vil rullebevegelsen raskt dø ut.
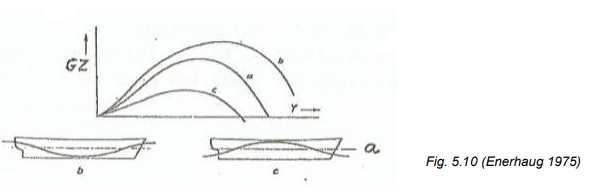
Grims hovedkonklusjon er at skipets stabilitet vil variere mellom en maks. verdi når skipet er i en bølgedal, og en min. verdi når det er på en bølgetopp. (Se fig. 5.10 og Kap. 2.1). (Grim 1952)
Det synes som om Grim var tidlig ute med å finne endel av rammebetingelsene for det vi idag kaller parametrisk resonans.
Størst forandring i stabilitet får en for bølger med lengde (lik skipets lengde). Hvis flere harmoniske bølger med lengde kommer etter hverandre, vil faren for kantring være stor. (Enerhaug 1975)
Problemstillingen rundt rulling av skip i akterlig, regelmessig sjø er også behandlet av J. Kerwin, som i likhet med Grim først gjør teoretiske beregninger som deretter følges opp av forsøk. De viktigste resultatene etter Kerwins mening er:
– resonansområdene er svært smale
– fra modell i ro tar det lang tid å bygge opp rullingen
– rullingene dempes ut ved faseforandringer, men bygges opp igjen ved ny korrekt fase (Kerwin 1955)